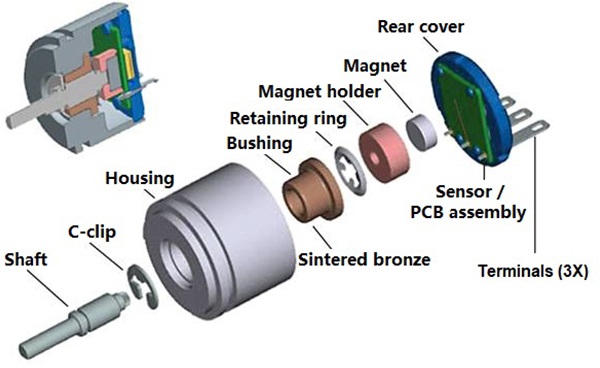
Si vous avez la possibilité de démonter un codeur rotatif magnétique, vous verrez généralement une structure interne comme celle illustrée ci-dessus. L'encodeur magnétique est composé d'un arbre mécanique, d'une structure de coque, d'un assemblage PCB à l'extrémité de l'encodeur et d'un petitdisque magnétiquetournant avec l'arbre à l'extrémité de l'arbre mécanique.
Comment le codeur magnétique mesure-t-il le retour de position de rotation ?
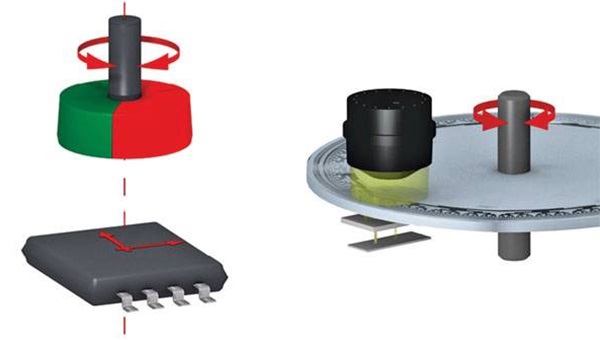
Effet Hall : production d'une différence de potentiel aux bornes d'un conducteur transportant un courant électrique lorsqu'un champ magnétique est appliqué dans la direction perpendiculaire à celle du courant circulant.
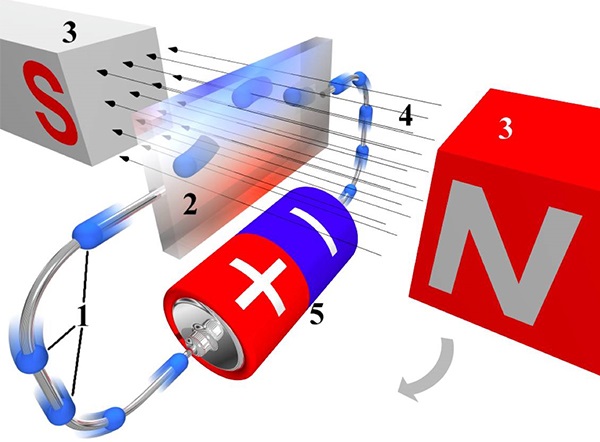
Si le champ magnétique appliqué au conducteur tourne dans la direction indiquée par la flèche ci-dessus avec le trajet du courant comme axe, la différence de potentiel de Hall changera en raison du changement de l'angle entre le champ magnétique et le conducteur, et le La tendance de changement de la différence de potentiel est une courbe sinusoïdale. Par conséquent, en fonction de la tension des deux côtés du conducteur sous tension, l’angle de rotation du champ magnétique peut être calculé de manière inverse. Il s'agit du mécanisme de fonctionnement de base d'un codeur magnétique lors de la mesure du retour de position de rotation.
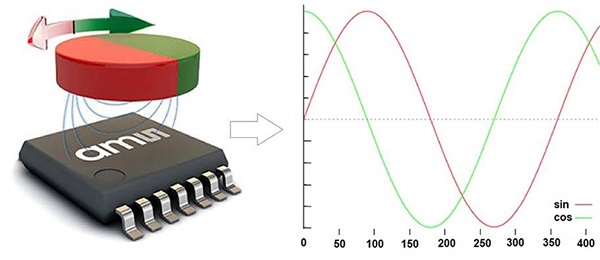
Semblable au principe selon lequel le résolveur utilise deux ensembles de bobines de sortie mutuellement perpendiculaires, deux (ou deux paires) d'éléments d'induction à effet Hall avec des directions de courant mutuellement perpendiculaires sont également nécessaires dans le codeur magnétique pour assurer la correspondance unique entre la position de rotation du champ magnétique. et la tension de sortie (combinaison).
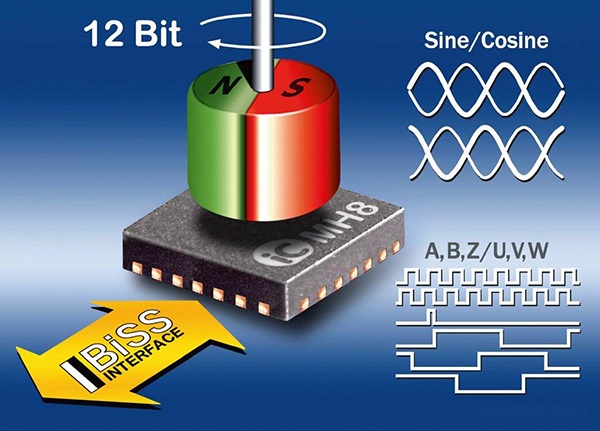
De nos jours, les capteurs Hall (puces) utilisés dans les codeurs magnétiques ont généralement un haut degré d'intégration, qui intègre non seulement des composants semi-conducteurs Hall et des circuits de traitement et de régulation du signal associés, mais intègre également divers types de modules de sortie de signal, tels que les modules analogiques sinus et cosinus. signaux, signaux de niveau numériques à onde carrée ou unités de sortie de communication par bus.
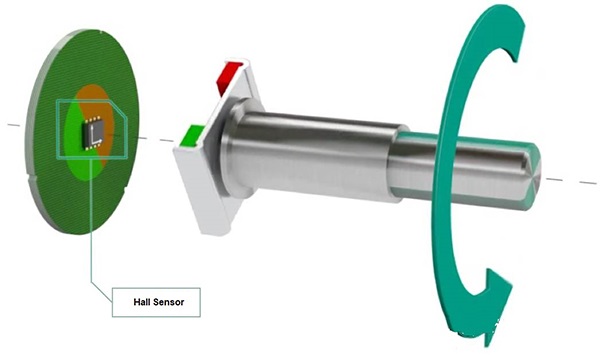
De cette façon, installez un aimant permanent comme un aimant en néodyme fritté qui génère un champ magnétique à l'extrémité de l'arbre rotatif de l'encodeur, placez la puce du capteur à effet Hall mentionnée ci-dessus sur une carte de circuit imprimé et approchez-vous de l'aimant permanent à l'extrémité de l'encodeur. arbre selon certaines exigences (direction et distance).
En analysant le signal de tension émis par le capteur à effet Hall via le circuit imprimé PCB, la position de rotation du rotor de l'encodeur peut être identifiée.
La structure et le principe de fonctionnement du codeur magnétique déterminent les exigences particulières concernant cet aimant permanent, par exemple le matériau de l'aimant, la forme de l'aimant, la direction de magnétisation, etc. NormalementAimant néodyme diamétralement magnétiséle disque est la meilleure option magnétique. Ningbo Horizon Magnetics est expérimenté dans la fourniture de nombreux fabricants d'encodeurs magnétiques avec certaines tailles deaimants à disques diamétraux en néodyme, D6x2,5 mm et D10x2,5 mm, dont les aimants en néodyme sont les modèles les plus populaires.
On peut voir que par rapport au codeur optique traditionnel, le codeur magnétique n'a pas besoin d'un disque de code complexe ni d'une source de lumière, le nombre de composants est moindre et la structure de détection est plus simple. De plus, l'élément Hall lui-même présente également de nombreux avantages, tels qu'une structure ferme, une petite taille, un poids léger, une longue durée de vie, une résistance aux vibrations, ne craignant pas la poussière, l'huile, la vapeur d'eau et la pollution par le brouillard salin ou l'attente de corrosion.
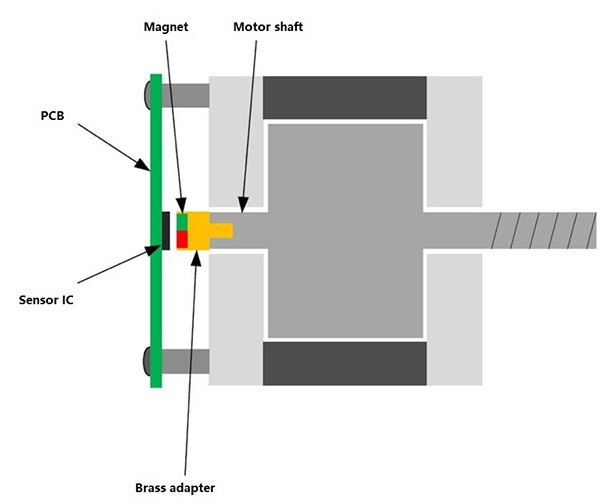
Lorsque la technologie du codeur magnétique est appliquée au retour de position de rotation du moteur électrique, lecylindre magnétique fritté NdFeBde l'encodeur magnétique peut être directement installé à l'extrémité de l'arbre du moteur. De cette manière, il peut éliminer le roulement d'accouplement transitoire (ou l'accouplement) requis lors de l'utilisation du codeur à rétroaction traditionnel et réaliser une mesure de position sans contact, ce qui réduit le risque de défaillance du codeur (ou même de dommages) dû à la vibration de l'arbre mécanique pendant le fonctionnement du moteur électrique. Cela contribue donc à améliorer la stabilité du fonctionnement du moteur électrique.
Heure de publication : 21 juillet 2022